红外方案

场地安装光塔
单个场地:大概长5米、宽5米、高2.5米左右。
低配:一个场地4个光塔。主要安装位置:立方体顶部四角。朝向场地地面中点。
高配:一个场地8个光塔。主要安装位置:立方体顶部四角、顶部四边中点。朝向场地地面中点。
通过一个独立路由器连接,组成局域网,独立子网。
光塔技术实现
主要部件:单片机,红外灯、红外摄像机。
主要作用:程控时间点,打开红外灯,照亮反光球,并拍摄红外照片。
定位原理:通过4/8张红外照片,加上光塔位置信息,运用拓普运算(CV计算机视觉),对反光球红外亮点,进行空间位置运算。
场地标定
运用独立的定位工具,通过光塔的红外照片,经过拓普运算(CV计算机视觉),推算出光塔在场地中的坐标位置。
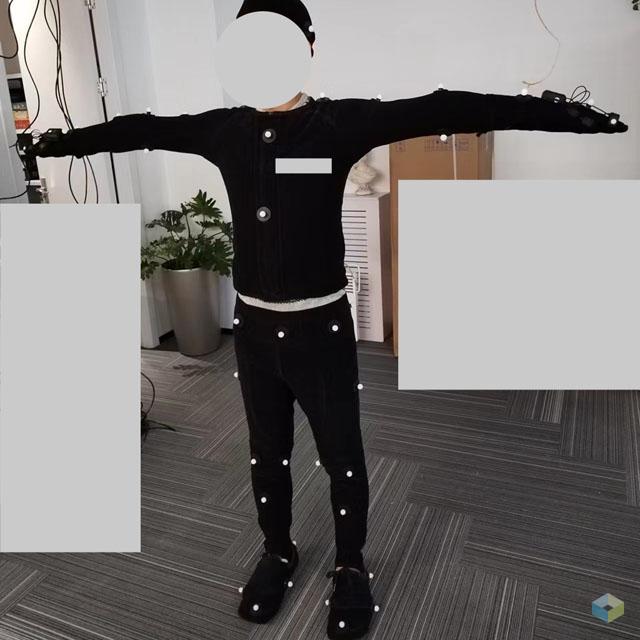
动捕标定
动捕服:在身体固定位置,粘贴反光球。用于红外相机拍照。
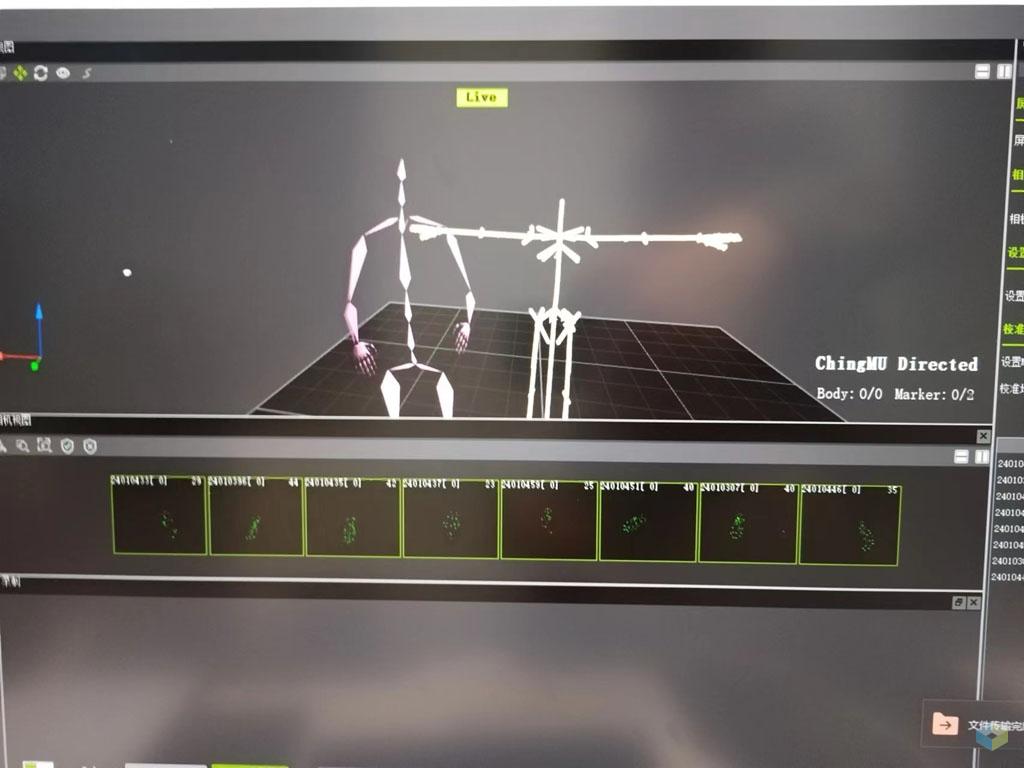
中之人的T-Pos动作,对身体固定位置反光球,进行初始定位。
随后动作,根据CV推算,反光球位置变换,从而实现骨骼动作。
激光方案
场地安装光塔
与红外类似。

光塔技术实现
主要部件:单片机,横向激光扫射器、竖向激光扫射器。
主要作用:通过激光扫射器,固定频率,向场地扫射激光光线。
定位原理:运用光塔位置信息,通过激光光线照射,和动捕服受光点受光状态,运用拓普运算(CV计算机视觉),进行空间位置运算。
场地标定
运用独立的定位工具,接受光塔的照射,经过拓普运算(CV计算机视觉),推算出光塔在场地中的坐标位置。
动捕标定
动捕服:在身体固定位置,安装有受光点(电子元器件),需接通电源并启动,方可运行。用于接受激光照射。
中之人的T-Pos动作,对身体固定位置的受光点,进行初始定位。
随后动作,根据CV推算,反光定位置变换,从而实现骨骼动作。

索尼便携动捕

技术实现:身体固定点位,配戴传感器钮扣(主要为陀螺仪)。
通过蓝牙传递数据,通过算法模拟骨骼。
摄像机动捕
摄像机拍摄照片,运用AI计算骨骼位置。
需要固定的中之人,固定的服装。
前期需要进行骨骼学习,确定AI模型。
有应用前景价值。可以提高同场人数。
结合性较差,如配载其他身体设备时,就会出错。
